Datasets Overview
This dataset is designed for research/calibration purpose of multiple-visual-inertial sensor rigs.
Sensors
Datasets (4IMUs+3Cams, 4IMUs+4Cams)
Sensors
We use self-built VI-Rig to collect data. The VI-Rig contains 4 IMUs, one monocular camera and 2 pair stereo cameras. We treat each camera of a stereo as two monocular cameras. So, we claim we have totally 5 cameras.
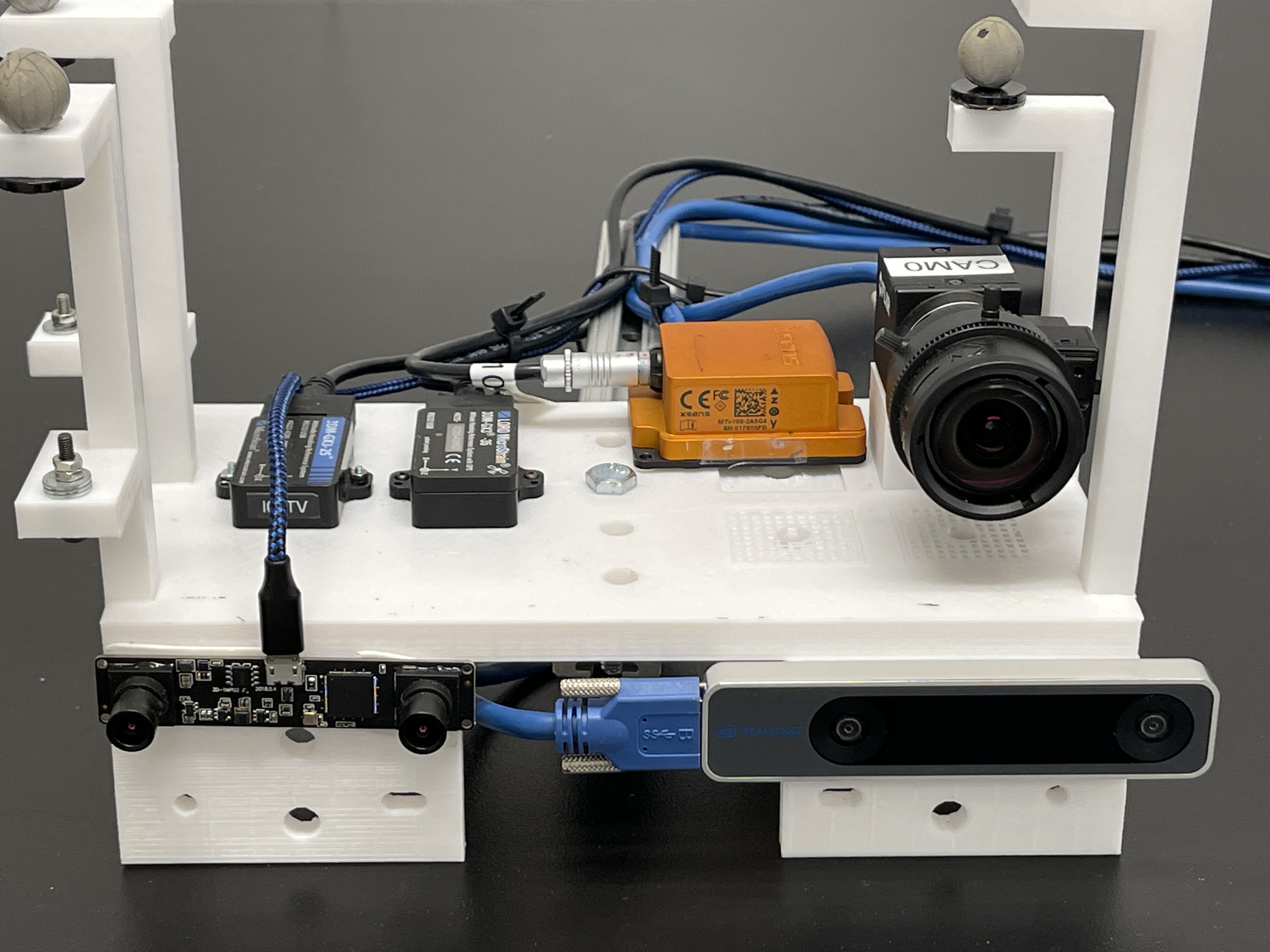 |
Visula-Inertial (VI)-Rig (4 IMUs and 5 Cameras):
|
The ROS drivers can be found here.
Datasets Info
The datasets contain the following ros topics:
| sensor | hz | topic | resolution |
| MicroStrain GX3-25 | 500hz | /gx3_25/data | |
| MicroStrain GX3-25 | 100hz | /gx3_35/imudata | |
| Xsens MTI-100 | 400hz | /imu/data | |
| RealSense T265 IMU | 200hz | /t265/imu | |
| RealSense T265 Left | 30hz | /t265/fisheye2/image_raw | 848x800 |
| RealSense T265 Right | 30hz | /t265/fisheye2/image_raw | 848x800 |
| ELP Left Rolling Shutter | 25hz | /elpsplit_sync_image_node/left/image_raw | 640x480 |
| ELP Right Rolling Shutter | 25hz | /elp/split_sync_image_node/right/image_raw | 640x480 |