Procedures
The detailed steps for using MVIS.
Create calibration target
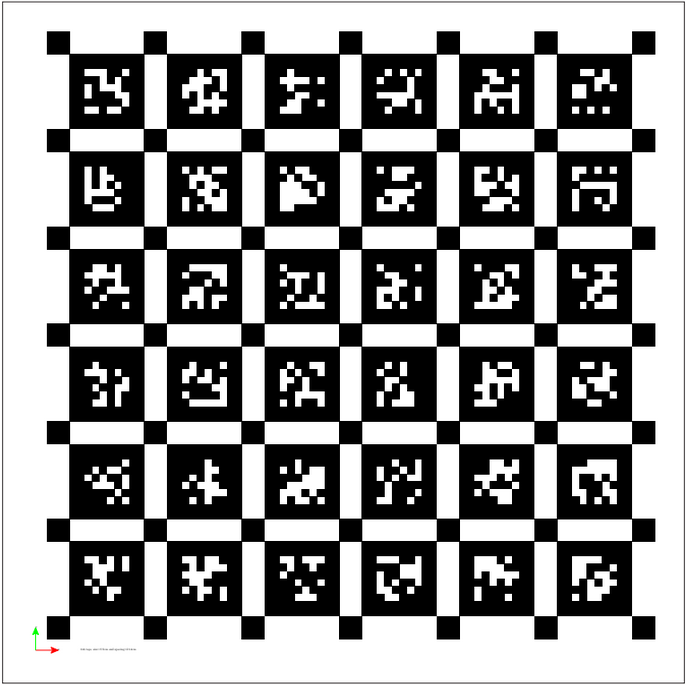
MVIS supports both April Tag and ArUco Tag. The calibration board of Kalibr can be directly used.
 |
Kalibr Target with April Tags |
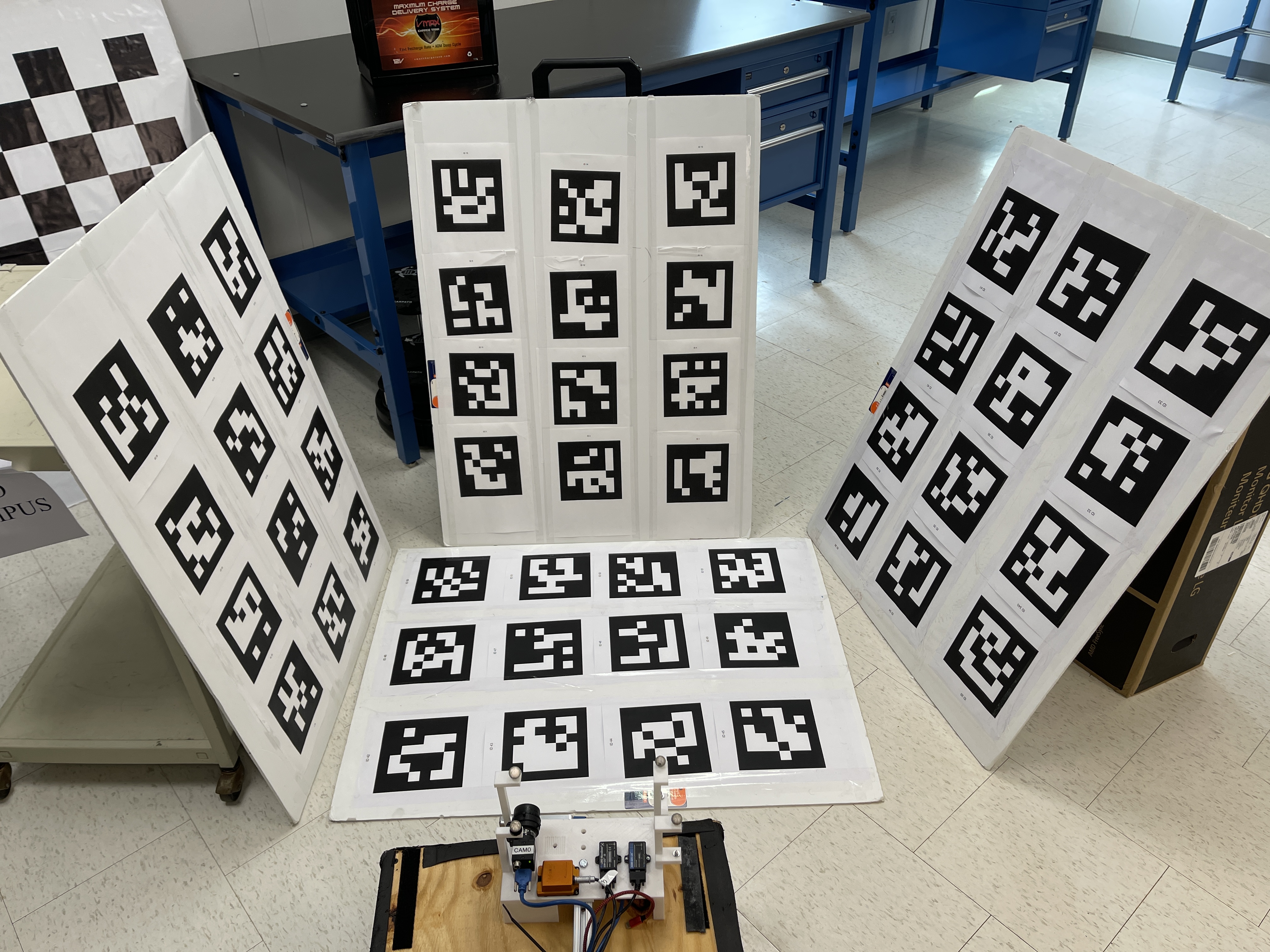 |
ArUco Target with ArUco Tags |
Collect data with ROS
MVIS is based on ROS bag data for calibration. A ROS driver collection for most commonly-used inertial sensors and cameras can be found here. If no ROS drivers are available, you can try out ros bag creator from here.
Please stand still for a few seconds to make sure the IMU can initialize itself.
When collecting data, make sure that the sensor motion is fully-excited.
After collecting data, setup the data path in the launch file:
<!-- dataset settings --> <arg name="dataset" default="4imus_4cams_15" /> <arg name="bag_path" default="/home/lin/Data/dataset/virig_4imus_4cams/$(arg dataset).bag" /> <arg name="bag_start" default="10" /> <arg name="bag_durr" default="-1" />
Setup sensor topic
Setup the ROS topics for cameras and IMUs that are needed to be calibrated in the launch file:
<!-- bag topics --> <param name="topic_imu" type="string" value="/gx3_25/data" /> <param name="topic_imu0" type="string" value="/gx3_35/imu/data" /> <param name="topic_imu1" type="string" value="/imu/data" /> <param name="topic_imu2" type="string" value="/t265/imu" /> <param name="topic_camera0" type="string" value="/t265/fisheye1/image_raw" /> <param name="topic_camera1" type="string" value="/t265/fisheye2/image_raw" /> <param name="topic_camera2" type="string" value="/elp/split_sync_image_node/left/image_raw" /> <param name="topic_camera3" type="string" value="/elp/split_sync_image_node/right/image_raw" />
Note that at least one IMU and one camera need to be specified to make the MVIS work.
‘‘topic_imu’’ is base IMU
‘‘topic_imuN’’ denotes auxiliary IMU, ‘‘N’’ is the numbering for auxiliary IMU.
‘‘topic_cameraN’’ denotes camera sensor, ‘‘N’’ is the numbering for camera sensor.
Sensor setup
For both base and auxiliary IMU sensor, we need to specify the following parameters:
<param name="gyroscope_noise_density" type="double" value="1.6968e-04" /> <!-- base imu --> <param name="gyroscope_random_walk" type="double" value="1.9393e-05" /> <!-- base imu --> <param name="accelerometer_noise_density" type="double" value="3.0000e-3" /> <!-- base imu --> <param name="accelerometer_random_walk" type="double" value="3.0000e-3" /> <!-- base imu -->
For auxiliary IMU, we also need to specify the IMU mode:
<arg name="imus_s_mode" default="[0, 0, 1]" /> <!-- 0: full imu, 1: gyro only -->
For camera measurement, the pixel noise is:
<arg name="cam_sigma_pix" default="1" />
Initialize IMU intrinsics
We first specify the base IMU model and base IMU intrinsics prior:
<param name="imu_model" type="int" value="1" />
<rosparam param="imu_b_intrinsics_Da">[1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0]</rosparam>
<rosparam param="imu_b_intrinsics_Dw">[1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0]</rosparam>
<rosparam param="imu_b_intrinsics_Tg">[0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0]</rosparam>
<rosparam param="R_gyrotoIb">
[1, 0, 0,
0, 1, 0,
0, 0, 1]
</rosparam>
<rosparam param="R_acctoIb">
[1, 0, 0,
0, 1, 0,
0, 0, 1]
</rosparam>
<arg name="prior_sigma_dw" default="0.01" /> <arg name="prior_sigma_da" default="0.01" /> <arg name="prior_sigma_tg" default="0.008" /> <arg name="prior_sigma_watoI" default="0.015" />
We then specify the auxiliary IMU model and auxiliary IMU intrinsics priors (N is the auxiliary IMU numbering):
<param name="imuN_model" type="int" value="0" />
<rosparam param="imu_sN_intrinsics_Da">[1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0]</rosparam>
<rosparam param="imu_sN_intrinsics_Dw">[1.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,1.0]</rosparam>
<rosparam param="imu_sN_intrinsics_Tg">[0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0,0.0]</rosparam>
<rosparam param="R_gyrotoIsN">
[
1, 0, 0,
0, 1, 0,
0, 0, 1
]
</rosparam>
<rosparam param="R_acctoIsN">
[
1, 0, 0,
0, 1, 0,
0, 0, 1
]
</rosparam>
You can also setup the auxiliary IMU mode to use full IMU or gyro only:
<arg name="imus_s_mode" default="[0, 0, 0, 0]" /> <!-- 0: full imu, 1: gyro only -->
Initialize CAM intrinsics
For cameras, we need to first specify whether it is fisheye or not:
<param name="camN_is_fisheye" type="bool" value="true" /> <!-- false: rad-tan model, true: equi-dist model -->
In order to get the camera intrinsics, we recommend the following possible ways to get the initial guess:
Camera with normal lens: ROS camera calibration with rad-tan model
Camera with fisheye lens: Kalibr camera calibration with equi-dist model.
Then put these camera intrinsics into the launch file (N is the numbering for camera sensor):
<arg name="camN_k" default="[288.74401121619053, 288.9183266575855, 416.1462245834943, 405.9717717814123]" /> <!-- fu, fv, cu, cv --> <arg name="camN_d" default="[-0.007770279089321504, 0.04423186828124172, -0.04124982882185576, 0.007307634776387351]" /> <!-- d1, d2, d3, d4 -->
We also need to specify the priors for camera intrinsics:
<arg name="prior_sigma_cam_k" default="3.0" /> <arg name="prior_sigma_cam_d" default="0.025" />
Initialize IMU-CAM spatial–temporal calibration
The spatial–temporal calibration between base IMU and camera0 is one of the key parameters that need to be initialized carefully. If using the Kalibr calibration board, you can also use Kalibr to get the initial guess of the transformation.
<param name="calib_camimu_dt0" type="double" value="0.01" />
<rosparam param="T_C0toI">
[
1.0, 0, 0, -0.38,
0, 0, -1.0, 0.24,
0, 1.0, 0, -0.1,
0, 0, 0, 1.00
]
</rosparam>
The spatial-temporal calibration between base IMU and other cameras can be relative easy. You can even start with transformation matrix as Identity matrix. But refinement is highly recommended.
If the camera is rolling shutter, we need to set related parameters:
<param name="cam0_is_rolling" type="bool" value="true" /> <param name="cam0_rs_readout_ms" type="double" value="10" /> <param name="cam0_rs_mode" type="int" value="0" /> <!-- 0: first row, 1: middle row, 2: last row -->
We also need to set the priors for these calibration:
<arg name="prior_sigma_camimu_dt" default="0.012" /> <arg name="prior_sigma_cam_rs" default="0.008" /> <arg name="prior_sigma_CtoI_pos" default="0.015" /> <arg name="prior_sigma_CtoI_ori" default="0.015" />
Initialize IMU-IMU spatial–temporal calibration
We need to specify the time offset and rigid transformation between base IMU and each auxiliary IMU. You can also start with Identity matrix and refine the estimates until it converges.
<param name="calib_imuimu_dt0" type="double" value="0.01" />
<rosparam param="T_ItoIsN">
[
1.0, 0, 0, -0.38,
0, 1.0, 0.0, 0.24,
0, 0.0, 1.0, -0.1,
0, 0, 0, 1.00
]
</rosparam>
We also need to setup the priors as:
<arg name=“priorsigmaimudt” default=“0.01” > <arg name=“priorsigmaItoIsori” default=“0.015” > <arg name=“priorsigmaItoIs_pos” default=“0.015” />
Estimator setup
For estimators, most cases the default setup is good enough. But you still manipulate the following settings.
For handling the estimators:
<arg name="use_marginals" default="false" /> <!-- recover state covariance --> <arg name="skip_optimize_after" default="250" /> <arg name="optimize_every_n" default="5" /> <arg name="max_iterations" default="1" /> <arg name="use_numerical_jacob" default="false" />
For handling the measurements:
<param name="imu_s_start_time" type="double" value="20" /> <param name="cam_start_time" type="double" value="20" /> <param name="cam_meas_skip" type="int" value="3" />
For handling the IMU initialization:
<param name="init_window_time" type="double" value="0.75" /> <param name="init_imu_thresh" type="double" value="1.0" />
Calibration
Check what parameters need to be calibrated:
<arg name="do_calibration_cam" default="true" /> <arg name="do_calibration_cam_in" default="true" /> <arg name="do_calibration_cam_t" default="true" /> <arg name="do_calibration_rolling" default="true" /> <arg name="do_calibration_imu_b_in" default="true" /> <arg name="do_calibration_imus_s" default="true" /> <arg name="do_calibration_imus_s_td" default="true" /> <arg name="do_calibration_imus_s_in" default="true" />
Then, we can run the launch file for calibration:
source devel/setup.bash roslaunch mvis yulin_virig_for_mvis_3cams.launch
Refinement
Check the output folder of the results:
<arg name="dosave_calib" default="true" /> <arg name="path_calib_est" default="$(find mvis)/calib_data/$(arg dataset)_calib_results.txt" />
If the new results are very close the initial values we input into the launch file, the calibration is done.
If the new results are still quite different with the initial values, we use the new results and re-calibrate these parameters.