Test With Simulator
After compilation, you can quickly test the MVIS with simulation.
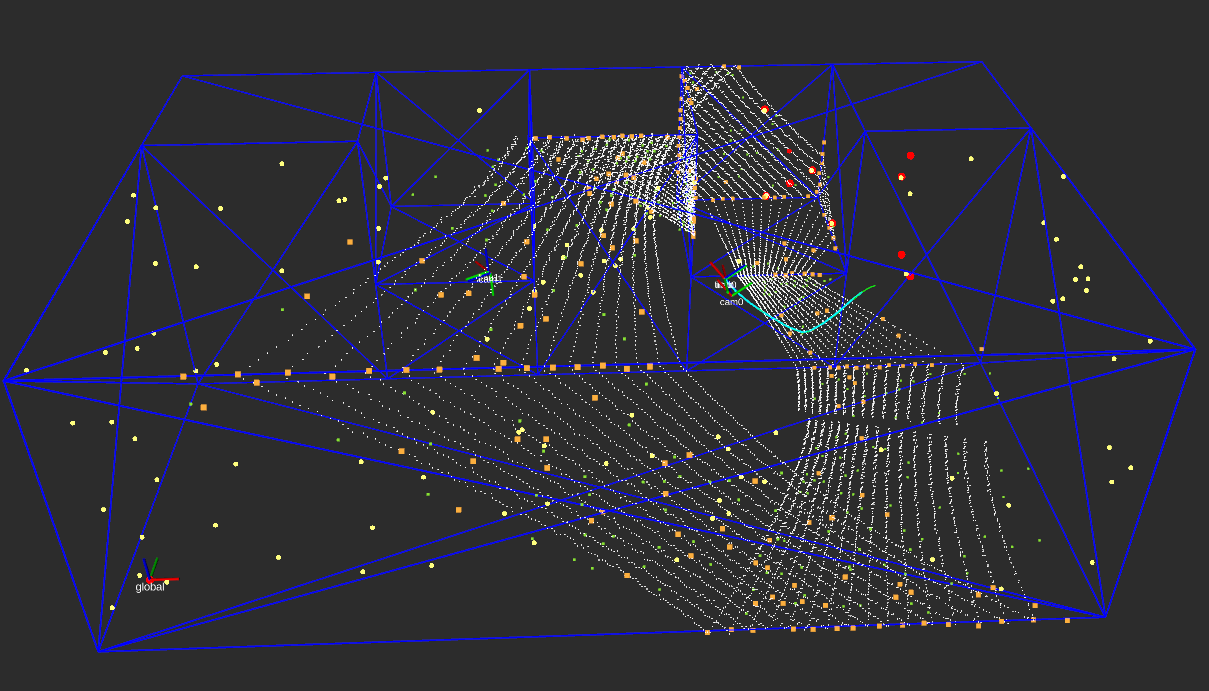 |
Simulation Environment
|
Run the simulation with:
source devel/setup.bash roslaunch mvis yulin_sim_multi_imu.launch
Note that you need to specify the OUTPUT_FOLDER for the results:
<arg name="dosave_state" default="true" /> <arg name="path_state_est" default="OUTPUT_FOLDER/state_est.txt" /> <arg name="path_state_std" default="OUTPUT_FOLDER/state_std.txt" /> <arg name="path_state_gt" default="OUTPUT_FOLDER/state_gt.txt" /> <arg name="dosave_calib" default="true" /> <arg name="path_calib_est" default="OUTPUT_FOLDER/$(arg dataset)_calib_results.txt" />
During the running, the rviz is recommended to check the estimated trajectory and map. Please use the display setup in:
src/mvis/launch/display.rviz
Check the simulation results:
rosrun mvis error_simulation OUTPUT_FOLDER/state_est.txt OUTPUT_FOLDER/state_std.txt OUTPUT_FOLDER/state_gt.txt
You can also use the shell scripts:
./src/mvis/paper_scripts/show_sim_single.sh
Test With Real World Datasets
1 Base IMU + 3 Auxiliary IMUs + 3 Global Shutter cameras
Download the example dataset collected using VI-Rig.
source devel/setup.bash roslaunch mvis yulin_virig_for_mvis_3cams.launch
Note that you need to specify the download dataset name and path through:
<arg name="dataset" default="virig_4imus_3cams_april_01" /> <arg name="bag_path" default="DATASET_PATH/$(arg dataset).bag" />
1 Base IMU + 3 Auxiliary IMUs + 2 Global Shutter cameras + 2 Rolling shutter cameras
Download the example dataset collected using VI-Rig.
source devel/setup.bash roslaunch mvis yulin_virig_for_mvis_init_large_errors.launch
Note that you need to specify the download dataset name and path through:
<arg name="dataset" default="virig_4imus_3cams_april_01" /> <arg name="bag_path" default="DATASET_PATH/$(arg dataset).bag" />
You can specify the way to use an auxiliary IMU (as Full IMU or Gyro only) through:
<arg name="imus_s_mode" default="[0, 0, 0]" /> <!-- 0: full imu, 1: gyro only -->
‘‘Full IMU’’ means both accelerometer and gyroscope of the IMU is used while ‘‘Gyro only’’ means only the gyroscope is used.